Recurrent Structural Policy Gradient for Partially Observable Mean Field Games
In this post, I will introduce Recurrent Structural Policy Gradient (RSPG), a Hybrid Structural Method that learns history-dependent policies for Partially Observable Mean Field Games with Public Information.
Many real-world systems involve large populations of interacting agents, such as investors responding to stock prices, households reacting to interest rates, or individuals adapting to reported infection levels during an epidemic. Mean-Field Games (MFGs) provide a principled framework for modelling these interactions. By assuming that individuals respond only to the aggregate behaviour of other agents, MFGs reduce the analysis of a large population model to the interaction between a stand-in agent and the mean field \(\mu_t\).
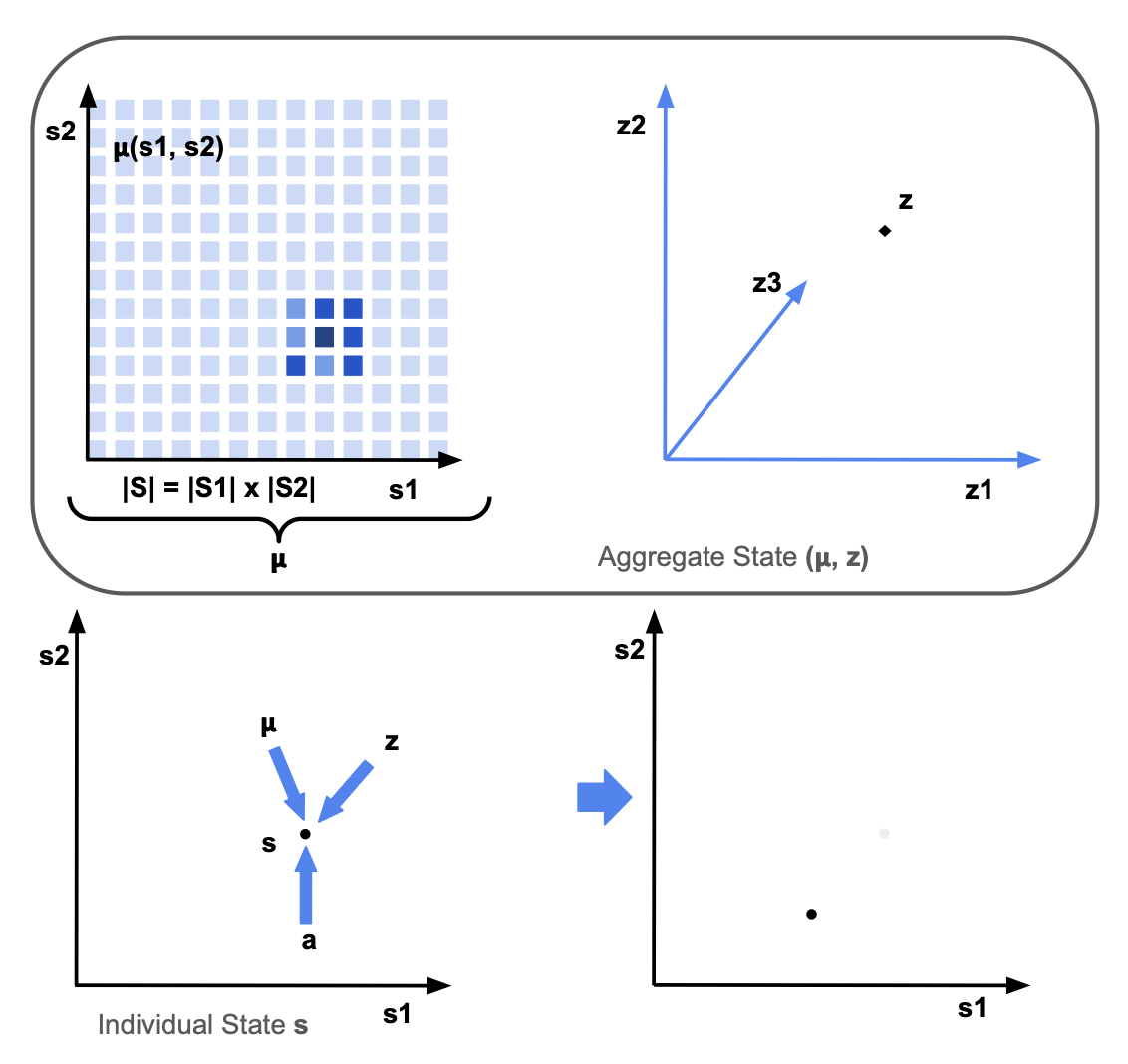
In MFGs with common noise, uncertainty enters through aggregate shocks that affect the entire population simultaneously. While idiosyncratic noise marginalises out at the population level, common noise induces stochastic evolution of the mean-field. The resulting Markovian aggregate state \((\mu_t, z_t)\) consists of the mean-field \(\mu_t\), a distribution over the individual state space \(\mathcal{S}\), and the common noise \(z_t\), which captures all remaining state components.
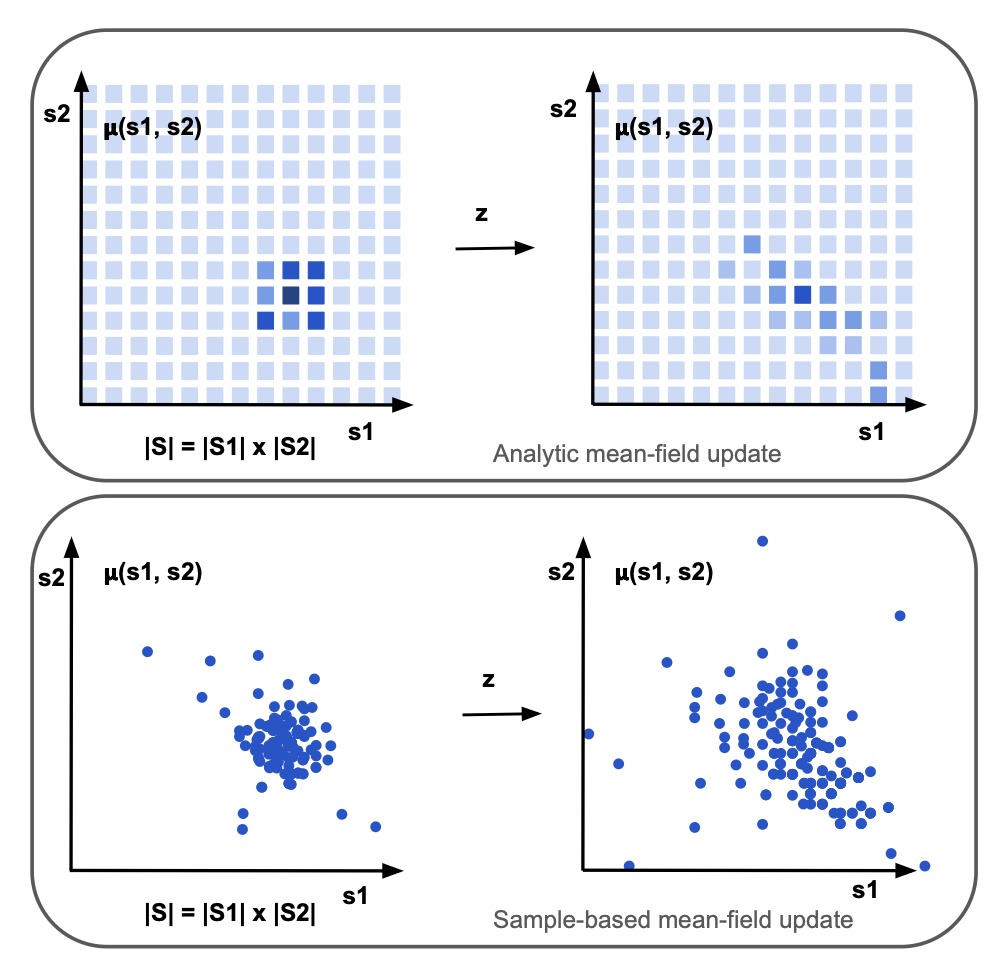
The analytic mean-field update conditions on a particular realisation of the common noise:
Or, in vector-matrix form:
In partially observable MFGs, agents must infer the aggregate state $(\mu_t, z_t)$ rather than observing it directly. As summarised by the following assumption, in many applications of interest, agents only receive a shared partial observation of the aggregate state. For example, the public information might be stock prices, interest rates, reported infection levels or communication signals.
The issue is that existing methods for modelling large population systems typically address only subsets of these three challenges posed by mean-field interaction, common noise, and partial observability. Deep Reinforcement Learning (RL) approaches for MFGs with common noise could trivially incorporate memory through recurrence to handle partial observability, but, as demonstrated in the following section, these methods are model-free and therefore do not exploit known system structure for variance reduction.
Dynamic Programming, Reinforcement Learning & Hybrid Structural Methods
In MFGs with common noise, the policy is usually updated by computing the value associated with the current policy and then taking a greedy step to improve that policy.
We now briefly describe policy evaluation using Dynamic Programming (DP), Reinforcement Learning (RL) and Hybrid Structural Methods (HSMs), which respectively leverage full, no or partial knowledge of the model.
White-box access to individual-state transition dynamics means that the induced mean-field sequence is computed analytically:
By evaluating the policy using exact expected returns, the Master Equation eliminates sample variance. But, in practice, integrating over all possible realisations of the mean-field due to different realisations of the common noise renders DP intractable.
Since transition dynamics are treated as a black-box, rather than computing the analytic mean-field update, the mean-field is repeatedly reapproximated using a sample-based method i.e. maintaining a population of agents:
The value of the policy is approximated along sample pathways:
Partially Observable Mean Field Games with Common Noise
The issue is extending HSMs and analytic mean-field updates to partially observable settings. In partially observable settings, there is information in histories, such that agents should take an action conditioned on their Individual-Action-Observation Histories (IAOHs) $\tau_t := (s_0, o_0, a_0, s_1, o_1, a_1, ..., s_t, o_t)$ $\in \mathcal{H}_t :=(\mathcal{S} \times \mathcal{O} \times \mathcal{A})^t \times \mathcal{S} \times \mathcal{O}$.
But, this means that computing the analytic mean-field update requires keeping track of not just the current mean-field ($\mu_t$, a distribution over $\mathcal{S}$), but a distribution over histories ($\tilde{\mu}_t$, a distribution over $\mathcal{H}_t$):
The problem is that the number of possible histories grows exponentially with time such that updating the mean-field and evaluating the policy would require enumerating an exponentially branching history tree.
Recurrent Structural Policy Gradient
Our insight is that, in many applications with public partial information, memory can be restricted to the history of shared aggregate observations, such that policies only condition on $(s_t, o_{0:t})$ rather than the full IAOH $\tau_t$. In many of these applications of interest, we can assume that, once an agent knows its current individual state and the public history of observations, its past private trajectory provides negligible additional information about the aggregate state.
For example, consider financial markets: an investor's past sequence of trades provides little additional information about the underlying state of the economy given the public history of stock prices and their current portfolio value.
The main benefit is that, because agents share a single history, the mean-field remains a distribution over the fixed state space, rather than over an exponentially growing history space:
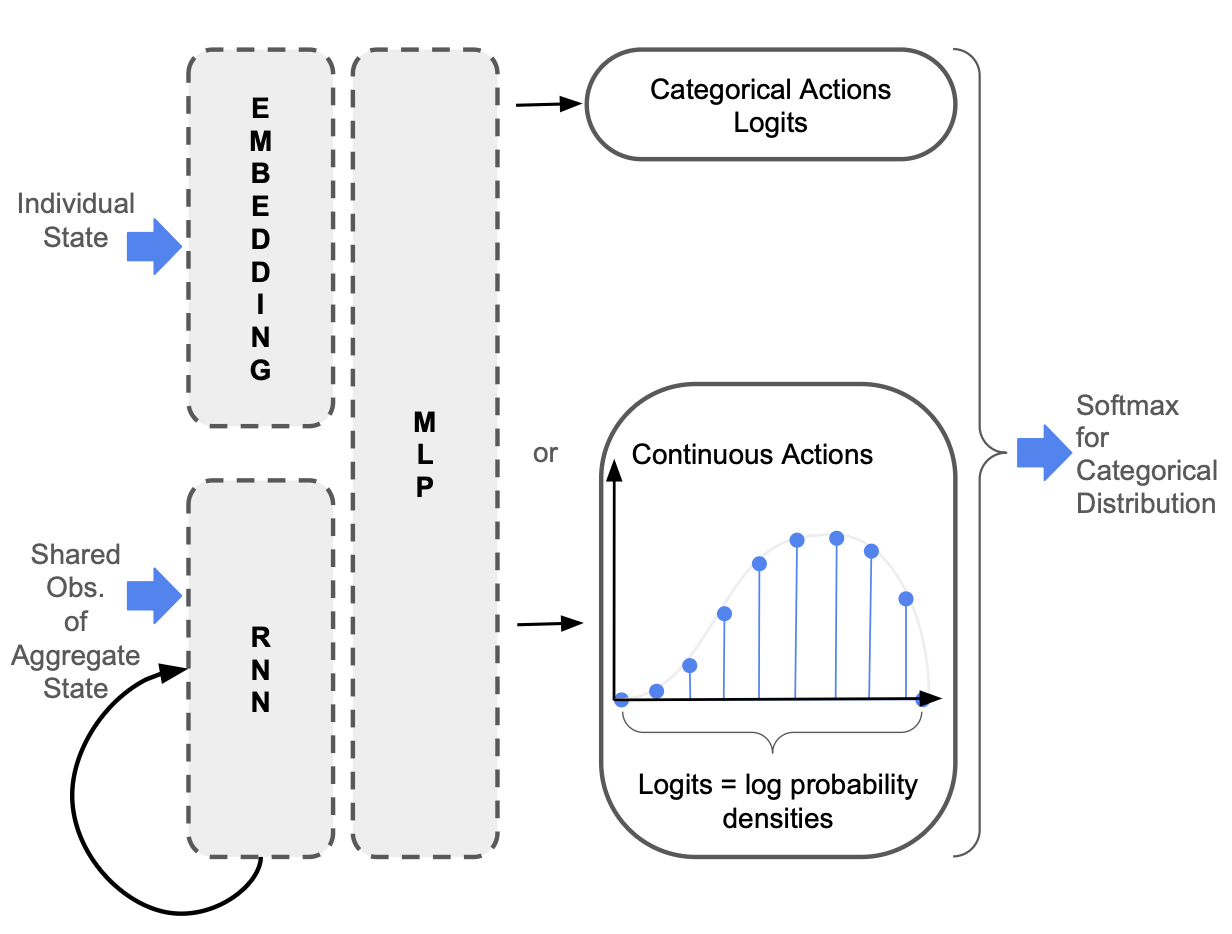
Although the length of this shared history grows linearly with time, in practice, it is not stored explicitly, but encoded in the hidden state of a recurrent neural network. In contrast, conditioning on IAOHs would require distinct hidden states for exponentially many histories.
In this way, RSPG is a history-aware HSM. This means that it both learns a history-dependent policy, leading to more realistic agent behaviour in partially observable settings, while also benefiting from low-variance updates.
MFAX: A JAX-Based Framework for MFGs
Finally, I'll briefly introduce MFAX, our open-source, JAX-based framework for MFGs designed to encourage more research into different MFG problem settings. Unlike existing libraries, MFAX:
- Supports both analytic and sample-based mean-field updates, thereby allowing implementation of different MFG problem settings (e.g. low vs. high-dimensional individual state spaces).
- Distinguishes between HSMs and RL-based methods: unlike RL-based methods, HSMs have white-box access to individual state transition dynamics.
- Accelerates analytic mean-field updates by using a functional representation of matrix multiplication.
- Supports more complex environments, such as with common noise, partial observability, and multiple initial mean-field distributions.